作者:新疆大学 计算机科学与技术 黄耀增
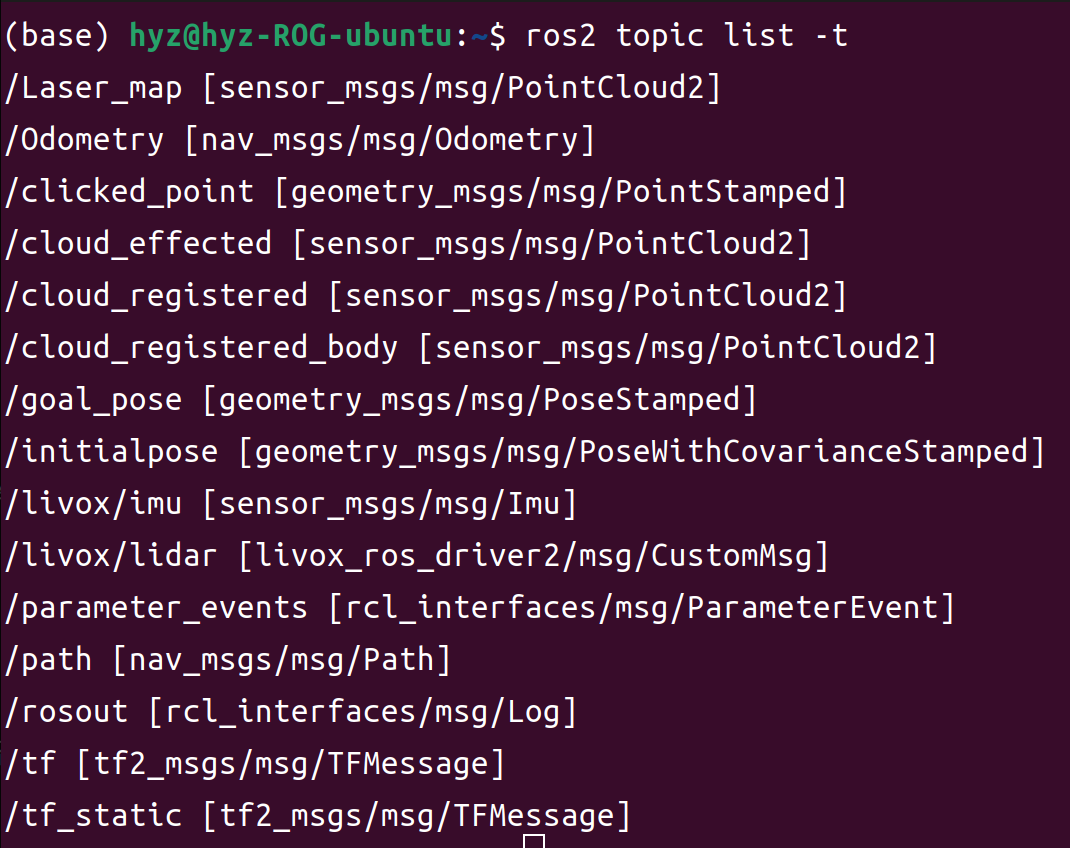
话题实在太多刚接触必然会受到困扰
以下是所有话题及其通信接口(不包括自己定义的话题类型)
一、/Odometry [nav_msgs/msg/Odometry]
(一)Header
std_msgs/Header header: 包含消息的元数据。-
builtin_interfaces/Time stamp: 消息的时间戳。-
int32 sec: 秒数。-
uint32 nanosec: 纳秒数。-
string frame_id: 表示父坐标系的帧 ID。
(二)Child Frame ID
string child_frame_id: 指定这个位置和速度估计所使用的坐标系,通常是机器人本体坐标系。
(三)Pose
geometry_msgs/PoseWithCovariance pose: 表示机器人在指定坐标系中的位置和姿态。-
Pose pose: 包含位置和方向。- **`Point position`**: 机器人的位置。 - `float64 x`: x 坐标。 - `float64 y`: y 坐标。 - `float64 z`: z 坐标。 - **`Quaternion orientation`**: 机器人的方向,使用四元数表示。 - `float64 x`: 四元数的 x 分量。 - `float64 y`: 四元数的 y 分量。 - `float64 z`: 四元数的 z 分量。 - `float64 w`: 四元数的 w 分量。-
float64[36] covariance: 位置和姿态的协方差矩阵,表示对这些估计的信心。
(四)Twist
geometry_msgs/TwistWithCovariance twist: 表示相对于child_frame_id的线性和角速度估计。-
Twist twist: 包含线性和角速度。- **`Vector3 linear`**: 线性速度。 - `float64 x`: x 方向的速度。 - `float64 y`: y 方向的速度。 - `float64 z`: z 方向的速度。 - **`Vector3 angular`**: 角速度。 - `float64 x`: 绕 x 轴的角速度。 - `float64 y`: 绕 y 轴的角速度。 - `float64 z`: 绕 z 轴的角速度。-
float64[36] covariance: 线性和角速度的协方差矩阵,表示对这些估计的信心。
二、/livox/imu [sensor_msgs/msg/Imu]
(一)Header
std_msgs/Header header: 包含消息的元数据。-
builtin_interfaces/Time stamp: 消息的时间戳。- `int32 sec`: 秒数。 - `uint32 nanosec`: 纳秒数。-
string frame_id: 指定坐标系的帧 ID,通常是 IMU 的参考框架。
(二)Orientation
geometry_msgs/Quaternion orientation: 表示 IMU 的当前方向,使用四元数表示。-
float64 x: 四元数的 x 分量。-
float64 y: 四元数的 y 分量。-
float64 z: 四元数的 z 分量。-
float64 w: 四元数的 w 分量。
(三)Orientation Covariance
float64[9] orientation_covariance: 表示方向的协方差矩阵,通常是 3x3 的矩阵,按行主序排列。它表示对方向估计的信心:- 对角线上的元素表示各个方向的方差。
- 非对角线元素表示方向之间的协方差。
(四)Angular Velocity
geometry_msgs/Vector3 angular_velocity: 表示 IMU 的角速度。-
float64 x: 绕 x 轴的角速度(单位:rad/s)。-
float64 y: 绕 y 轴的角速度(单位:rad/s)。-
float64 z: 绕 z 轴的角速度(单位:rad/s)。
(五)Angular Velocity Covariance
float64[9] angular_velocity_covariance: 表示角速度的协方差矩阵,类似于方向协方差,表示对角速度估计的信心。
(六)Linear Acceleration
geometry_msgs/Vector3 linear_acceleration: 表示 IMU 的线性加速度。-
float64 x: x 方向的加速度(单位:m/s²)。-
float64 y: y 方向的加速度(单位:m/s²)。-
float64 z: z 方向的加速度(单位:m/s²)。
(七)Linear Acceleration Covariance
float64[9] linear_acceleration_covariance: 表示线性加速度的协方差矩阵,表示对加速度估计的信心。